UE4中的数学随笔
前言
记录UE开发时常用的数学方法
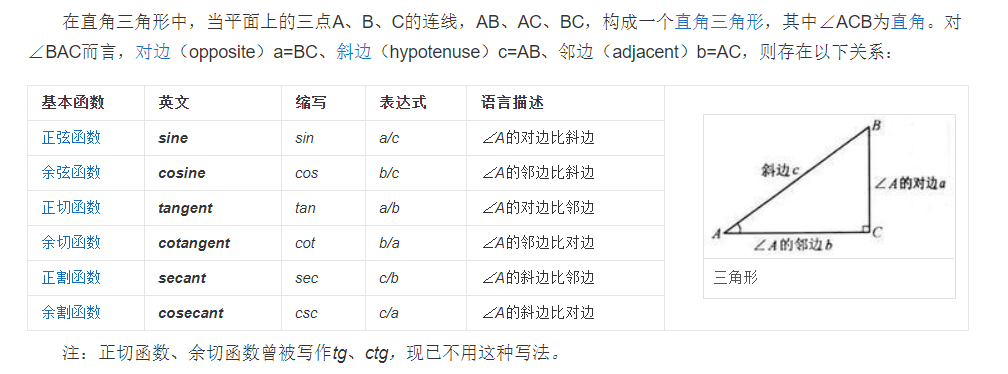
三角函数
三角函数
特殊角

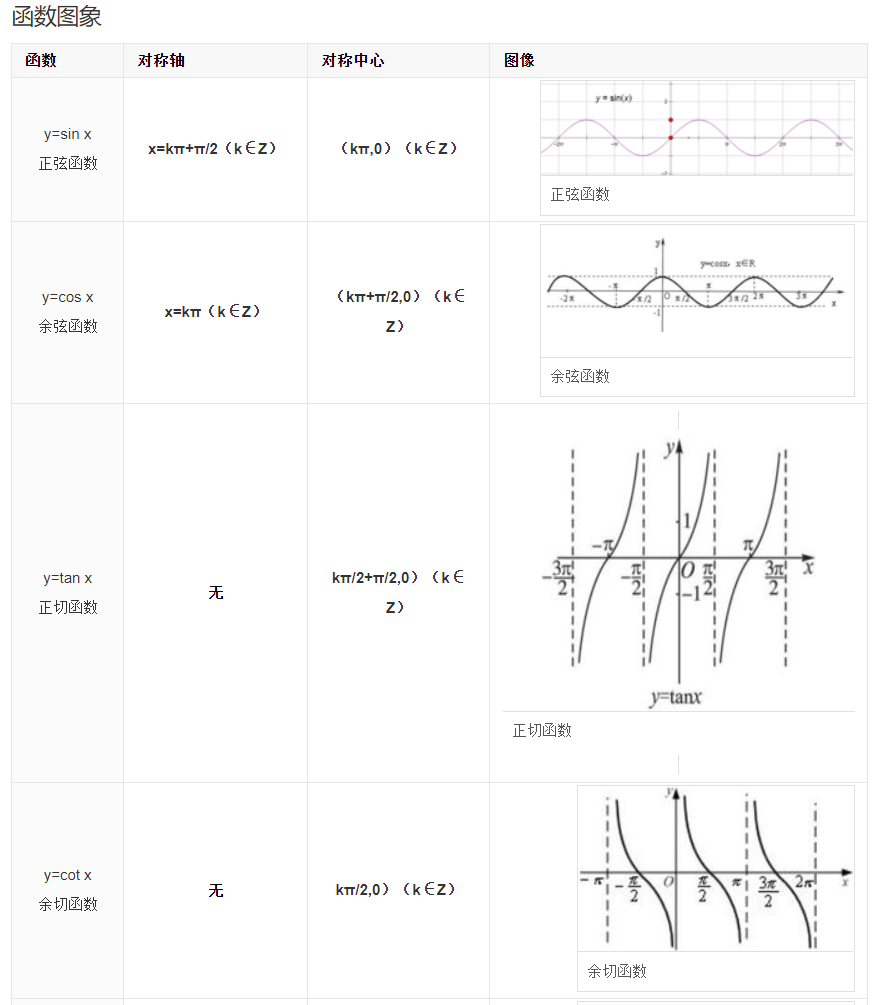
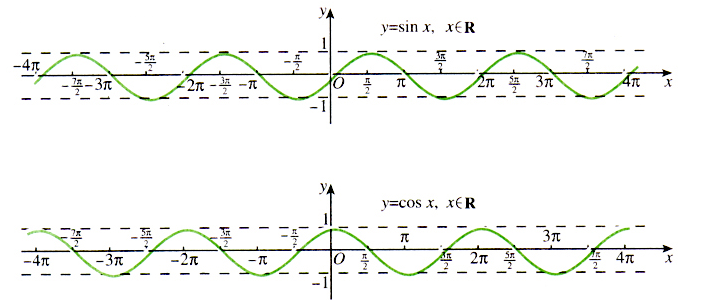
几何性质
公式
| 公式1 | 公式2 |
|---|---|
| sin(2kπ+α)=sin α | sin(π+α)=-sin α |
| cos(2kπ+α)=cos α | cos(π+α)=-cos α |
| tan(2kπ+α)=tan α | tan(π+α)=tan α |
| cot(2kπ+α)=cot α | cot(π+α)=cot α |
| sec(2kπ+α)=sec α | sec(π+α)=-sec α |
| csc(2kπ+α)=csc α | csc(π+α)=-csc α |
| 公式3 | 公式4 |
|---|---|
| sin(-α)=-sin α | sin(π-α)=sin α |
| cos(-α)=cos α | cos(π-α)=-cos α |
| tan(-α)=-tan α | tan(π-α)=-tan α |
| cot(-α)=-cot α | cot(π-α)=-cot α |
| sec(-α)=sec α | sec(π-α)=-sec α |
| csc(-α)=-csc α | csc(π-α)=csc α |
UE4的三角函数
- Radius就是用三角函数来计算,横轴是(0,kPI),纵轴是(0,1)
- Degree就是用的基础的直角三角形函数,例如Sine是
Sinθ=a/c计算,输入参数是角度,得到的是[0,1]
Sine,ASine
蓝图Sine(Radius)
1 | float UKismetMathLibrary::Sin(float A) |
Sine(PI)–>0
Sine(PI/2)–>1
ASine(1)–>PI/2
ASine(-1)–>-PI/2
蓝图Sine(Degree)
1 | float UKismetMathLibrary::DegSin(float A) |
SineD(30)–>0.5
SineD(90)–>1
ASineD(0.5)–>30
ASineD(1)–>90
Cos,ACos
Cos(Radius)
Cos(PI)–>-1
ACos(1)–>0
ACos(-1)–>PI
Cos(Degree)
Cos(60)–>0.5
Cos(0)–>1
Tan
- 蓝图没有提供Cot方法,本质上就是tan的2个参数反转一下
特殊角度的值
Tan(PI)–>0
Tan(PI/2) –>垃圾值,如图
ATan(0)–>0
ATan(无穷)–>接近于PI/2,如图
TanD(45)–>1
TanD(90)–>垃圾值,因为分母=0
ATanD(1)–>45
ATanD(0)–>0
ATanD( 无穷大)–>接近于90
蓝图额外Tan方法
ATan2有2个方法,简单说就是提供了2个输入参数:A,B
计算就是A/B
ATan2D,可以输入2条边的长度,得到比例
三角函数应用
求两个向量夹角
1 | cosx=a*b/[|a|*|b|] |
1 | float GetTwoVectorAngle(FVector a,FVector b) |
得到的是[-180,180]的值
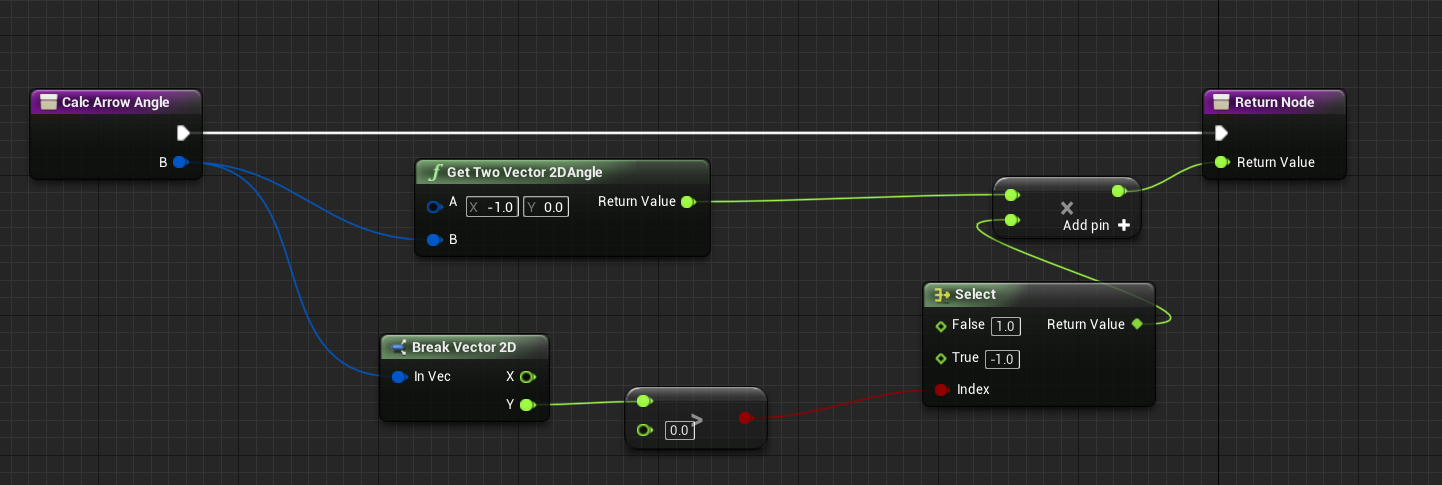
UMG中的箭头
由于UMG的旋转是[-180,180]的范围
所以可以对方向向量与(-1,0)做夹角计算,如下图得到旋转值
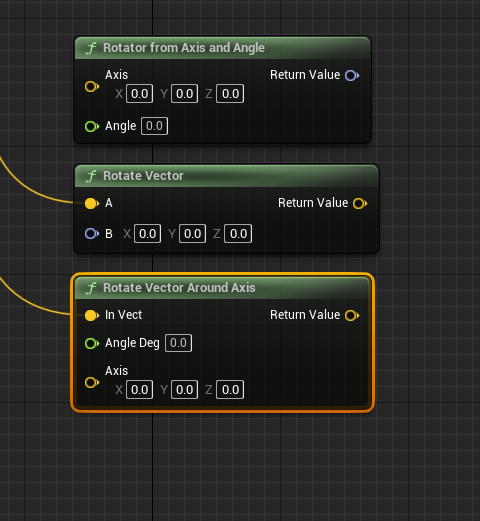
按角度旋转向量
- 已知点(x1,y1),绕(x2,y2)旋转θ
1 | x= (x1 - x2)*cos(θ) - (y1 - y2)*sin(θ) + x2 ; |
- 如果是绕原点旋转,公式可以简化成
1 | x= x1*cos(θ) - y1*sin(θ) ; |
在UE中已经封装了很多比较方便的库来旋转向量
UE中的矩阵变换
相对关系
A相对于B的变换信息, 用TransformA.GetRelativeTransform(TransformB);
蓝图有两个类似的API, 但是有点容易造成歧义
我们看实现
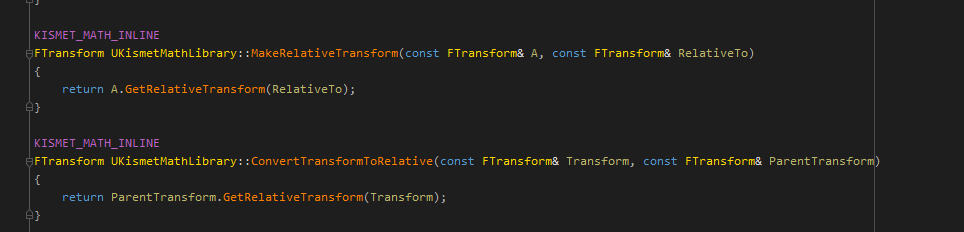
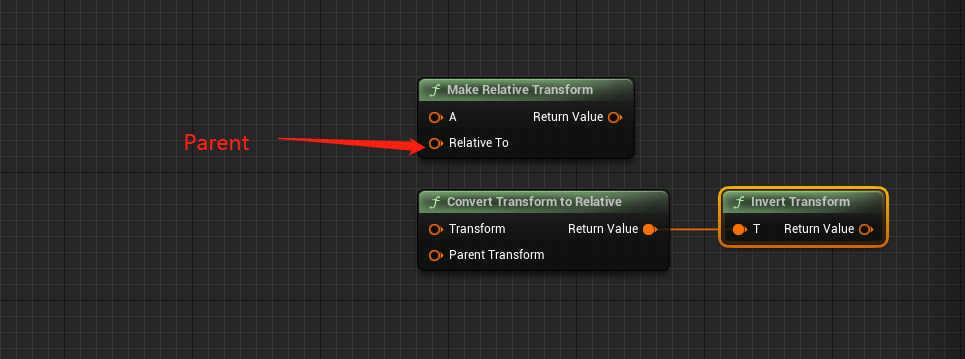
MakeRelativeTransform的第二个参数输入Parent这个没问题,
但是看ConvertTransformToRelative的第二个输入Parent获取到的实际上是夫相对于子的相对变换信息, 那么两者等价的情况要如下图所示
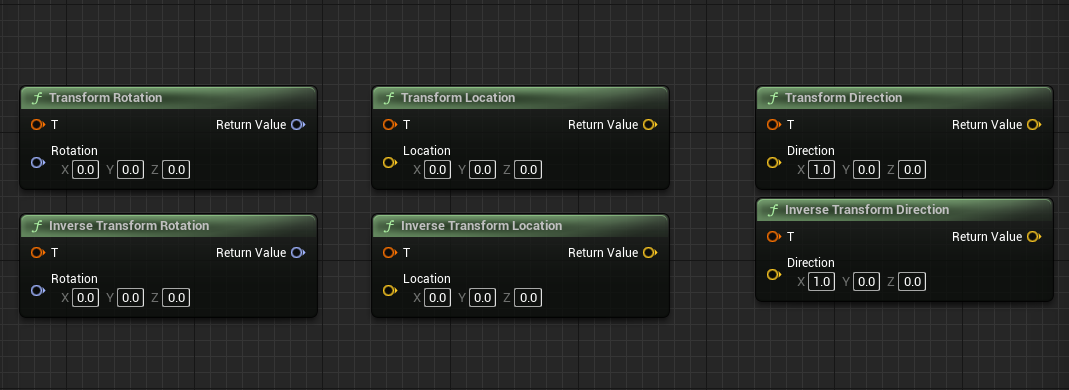
空间转换
1 | //把Location转换至T的空间,如果是GetActorTransform获取Transoform,即世界空间 |
上面即Location的空间转换, 同理还有Direction和Rotation, 方法类似
蓝图只是套了一层,没有实质性区别
逆矩阵
1 | T.Inverse(); |
矩阵乘法
c++中可以直接对Transofomr进行*运算符运算, 在蓝图中包了一层, 使用的是FTransform UKismetMathLibrary::ComposeTransforms(const FTransform& A, const FTransform& B)
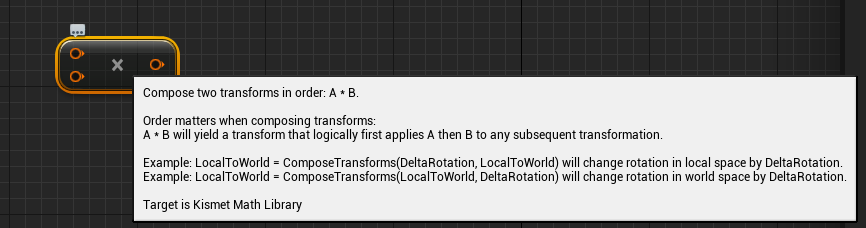
乘法需要区分左乘和右乘, 这个跟图形中常用的运算比较类似,ComposeTransforms注释中的用法是很多场合中会用到的
先通过一个案例了了解一下矩阵乘法
经常需要用到角色的RootMotion信息转换成角色世界空间的位移信息, 这个如何做?
首先从动画提取RootMotion信息, 这个有很多已有的API了, 如
1 | FTransform UAnimSequence::ExtractRootMotionFromRange(float StartTrackPosition, float EndTrackPosition) const; |
提取出来的RootMotion数据(假设叫RM)是模型空间的, 那么需要在世界空间进行这个偏移得到RMWS
1 | RMWS = RM * MeshTransformWS;//模型世界空间变换信息进行rootmotion偏移 |
然后需要把RMWS数据通过逆矩阵转换到Character空间的,因为模型可能会有相对偏移和旋转
1 | FTransform Mesh2CharInverse = StartChacterFootTransform.GetRelativeTransform(MeshTransformWS); |
上面的StartChacterFootTransform是角色脚底的Transform, 因为RootMotion都是基于脚底的
如果还是不知道如何使用, 可以暴力的记住几个常用场景的用法
- Actor本地空间进行旋转和偏移,那么使用左乘变换信息, 即
变换Transform * ActorTransform - 在世界空间中进行变换, 那么可以是变换
ActorTransform * 变换Transform
上面的1没什么问题, 对2再进一步解释
比如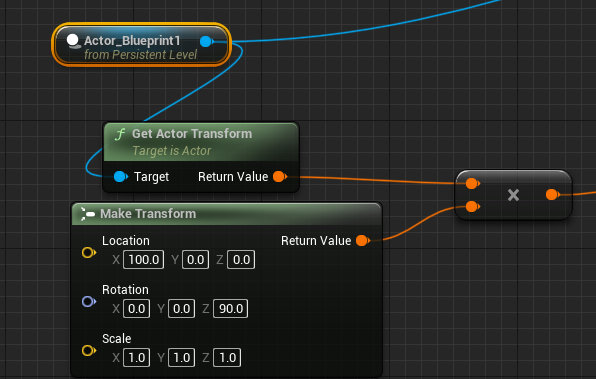
这个几何意义即, 当前这个Actor先绕世界0点进行90度偏移, 然后再基于世界空间的X轴偏移100
上面的操作等价于下图
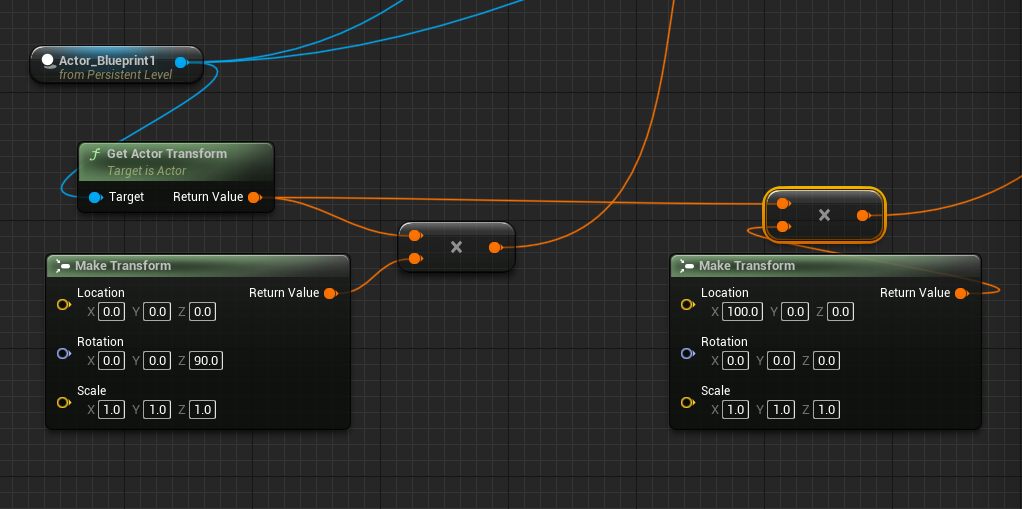
具体的过程如下图
范数
范数是函数,几何意义即比较向量的大小
向量X={2,3,-5,7}
- 1范数:各个元素的绝对值之和
||X||1=2+3+5+7=17;
- 2范数:各个元素的平方和再开更号
||X||2=(2x2+3x3+5x5+7x7)1/2=9.3274
- p范数:各个向量元素绝对值p次方和的1/p次方
- 无穷范数:各个元素绝对值最大的哪个元素的绝对值